ROBOWORKS N10 Robot Təhsilli Proqramlaşdırıla bilən Mobil Robot

Spesifikasiyalar
| Məhsulun adı | Mühərrikin azaldılması nisbəti | Maksimum Sürət | Çəki | Maksimum yük | Ölçü | Minimal Dönmə Radiusu |
|---|---|---|---|---|---|---|
| Robot 2 | 1:27 | 1.3m/s | 5.92 kq | 16 kq | 445*360*206mm | 0.77 m |
| Rosbot Pro | 1:18 | 1.65m/s | 19.54 kq | 35 kq | 774*570*227mm | 1.02 m |
| Rosbot Plus | 1:18 | 2.33m/s | 35.16 kq | 22 kq | 766*671*319mm | 1.29 m |
Batareyanın ömrü və enerji təchizatı:
- Robot 2: Təxminən 9.5 saat (yüksüz), Təxminən 8.5 saat (tam yük)
- Robot Pro: Təxminən 4.5 saat (yüksüz), Təxminən 3 saat (tam yüklə)
- Enerji təchizatı: 24v 6000 mAh batareya + 3A cari smart şarj cihazı
Sükan və Sürmə Sistemi:
Əsas komponentlərə aşağıdakılar daxildir:
- Sükan mexanizmi: S20F 20 kq fırlanma anı rəqəmsal servo
- Təkərlər: WH060 60 kq fırlanma anı rəqəmsal servo, Rosbot 125 üçün 2 mm diametrli bərk rezin təkərlər, Robot Pro üçün 150 mm diametrli bərk rezin təkərlər və
- Kodlayıcı: 500 xətt AB fazalı yüksək dəqiqlikli kodlayıcı
- Asma sistemi: Robot 2 üçün koaksial sarkaçlı asma sistemi, Robot Pro üçün 4W müstəqil asma sistemi və
- İdarəetmə interfeysi: Bluetooth və ya Wifi, PS2, CAN, Serial Port, USB vasitəsilə iOS və Android Proqramı
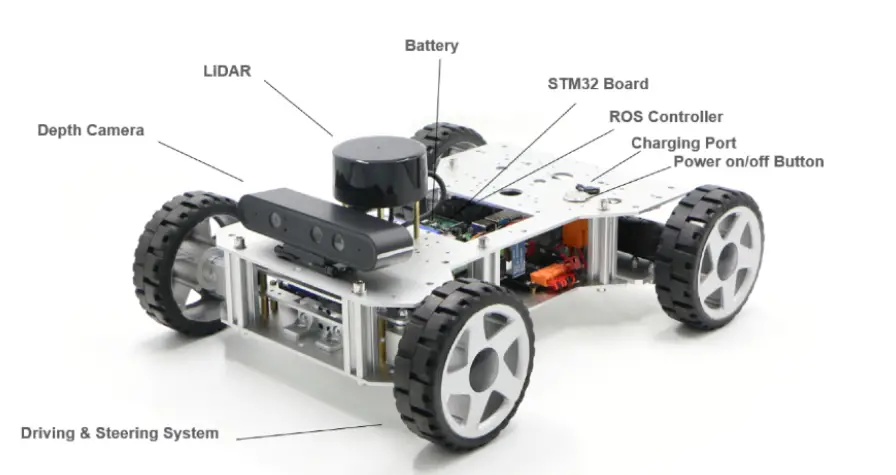
ROS nəzarətçilərinə giriş:
Bütün RRobotsare jest nəzarəti, skeletin izlənilməsi və 3D skan edilməsi daxil olmaqla müxtəlif istifadələr üçün Orbbec Astra Dərinlik Kamerası ilə təchiz edilmişdir.
STM32 lövhəsi:
Lövhədə Yaddaşlar, Saat, Sıfırlama və Təchizat İdarəetmə, Güc DMA, Debug Mode, Giriş/Çıxış portları, Taymerlər və Rabitə İnterfeysi daxil olmaqla müxtəlif funksiyaları olan STM32F103RC nüvəsi var.
Tez-tez verilən suallar
S: Batareyanı necə doldurmaq olar?
A: RRobot-u doldurmaq üçün 3v 24mAh batareya ilə təchiz edilmiş 6000A cari ağıllı şarj cihazından istifadə edin
S: Rosbot Pro-nun batareya ömrü nə qədərdir?
Cavab: Robot Pro-nun batareyanın işləmə müddəti təxminən 4.5 saat yüksüz, tam yükləmə şəraitində isə təxminən 3 saatdır.
S: Smartfondan istifadə edərək Rosbotu idarə edə bilərəmmi?
Cavab: Bəli, Bluetooth və ya Wifi vasitəsilə iOS və Android proqramından istifadə edərək Rosbot-u idarə edə bilərsiniz.
Əsas Komponent
| Dəyişən | Şəkil |
| Robot 2 |  |
| Robot Pro |  |
| Robot Plus |  |
Məhsulun spesifikasiyası
|
Məhsul Matrisi |
 |
 |
 |
| Məhsulun adı | Robot 2 | Robot Pro | Robot Plus |
| Mühərrikin azaldılması nisbəti | 1:27 | 1:18 | 1:18 |
| Maksimum Sürət | 1.3m/s | 1.65m/s | 2.33m/s |
| Çəki | 5.92 kq | 19.54 kq | 35.16 kq |
| Maksimum yük | 16 kq | 35 kq | 22 kq |
| Ölçü | 445*360*206mm | 774*570*227mm | 766*671*319mm |
| Minimal Dönmə Radiusu | 0.77 m | 1.02 m | 1.29 m |
| Batareya Ömrü | Təxminən 9.5 saat (yüksüz), təxminən 8.5 saat (tam yük) | Təxminən 4.5 saat (yüksüz), təxminən 3 saat (tam yük) | |
| Enerji təchizatı | 24v 6000 mAh batareya + 3A cari smart şarj cihazı | ||
| Sükan çarxı | S20F 20 kq fırlanma anı rəqəmsal servo | WH060 60 kq fırlanma anı rəqəmsal servo | |
| Təkərlər | 125 mm diametrli bərk rezin təkərlər | 150 mm diametrli bərk rezin təkərlər | 254 mm şişmə rezin təkərlər |
| Kodlayıcı | 500 xətt AB fazalı yüksək dəqiqlikli kodlayıcı | ||
| Asma sistemi | Koaksial Pendulum Asma Sistemi | 4W Müstəqil Asma Sistemi | |
| Nəzarət interfeysi | Bluetooth və ya Wifi, PS2, CAN, Serial Port, USB vasitəsilə iOS və Android Proqramı | ||
ROS nəzarətçilərinin təqdimatı
Vidia Jetson platformasına əsaslanan RRobot ilə istifadə üçün 2 növ ROS Nəzarətçi mövcuddur. Jetson Orin Nano tədqiqat və təhsil üçün daha uyğundur. Jetson Orin NX məhsul prototipləri və kommersiya tətbiqləri üçün idealdır. Aşağıdakı cədvəl Roboworks-dən əldə edilən müxtəlif nəzarətçilər arasındakı əsas texniki fərqləri göstərir. Hər iki lövhə yüksək səviyyəli hesablamalara imkan verir və kompüter görmə, dərin öyrənmə və hərəkət planlaşdırma kimi qabaqcıl robot tətbiqləri üçün uyğundur.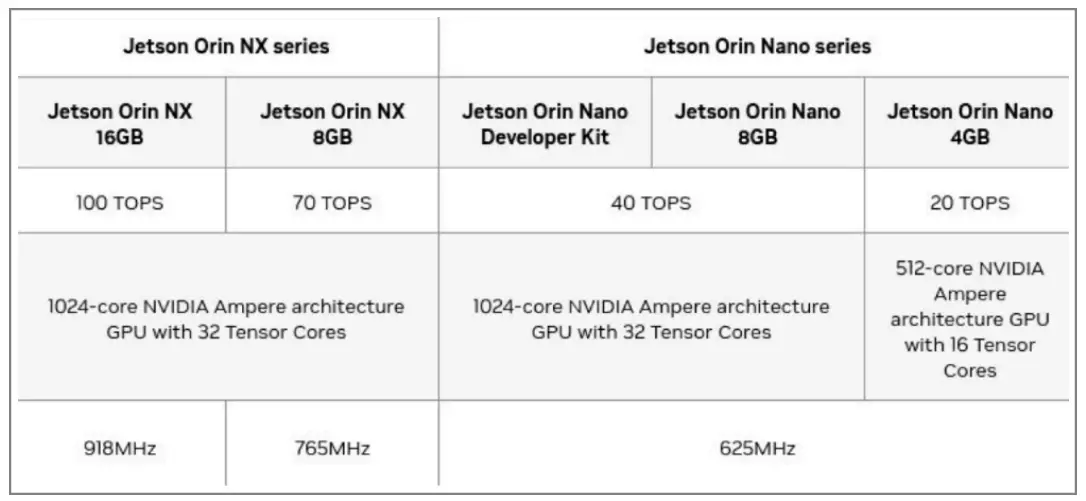
Algılama Sistemi: LiDAR və Dərinlik Kamerası
Leishen LSLiDAR, N10 və ya M10 modelinin istifadə edildiyi bütün Rosbot varyasyonlarında quraşdırılmışdır. Bu LLiDARs 3360-3360 dərəcə skan və ətrafı qavramağı təklif edir və yığcam və yüngül ESI ilə öyünür. Onlar yüksək siqnal səs-küy nisbətinə və yüksək/aşağı əks etdirən obyektlərdə əla aşkarlama performansına malikdirlər və güclü işıq şəraitində yaxşı işləyirlər. Onların aşkarlama diapazonu 30 metr və skan tezliyi 12 Hz-dir. Bu LiDAR Robotlara problemsiz şəkildə inteqrasiya edərək layihənizdə bütün xəritəçəkmə və naviqasiya istifadələrinin asanlıqla əldə olunmasını təmin edir. Aşağıdakı cədvəl sürgülərin texniki xüsusiyyətlərini ümumiləşdirir: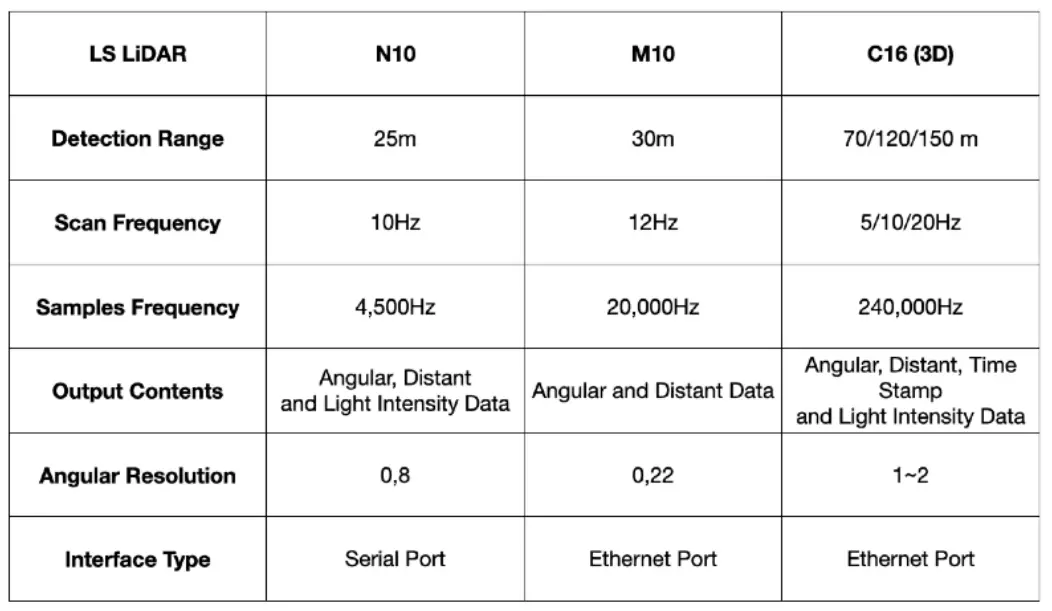
Bundan əlavə, bütün Robotlar RGBD kamera olan Orbbec Astra Dərinlik Kamerası ilə təchiz edilmişdir. Bu kamera jest nəzarəti, skeletin izlənməsi, 3D skan edilməsi və nöqtə buludunun inkişafı daxil olmaqla bir sıra istifadələr üçün optimallaşdırılıb. Aşağıdakı cədvəldə dərinlik kamerasının texniki xüsusiyyətləri ümumiləşdirilmişdir.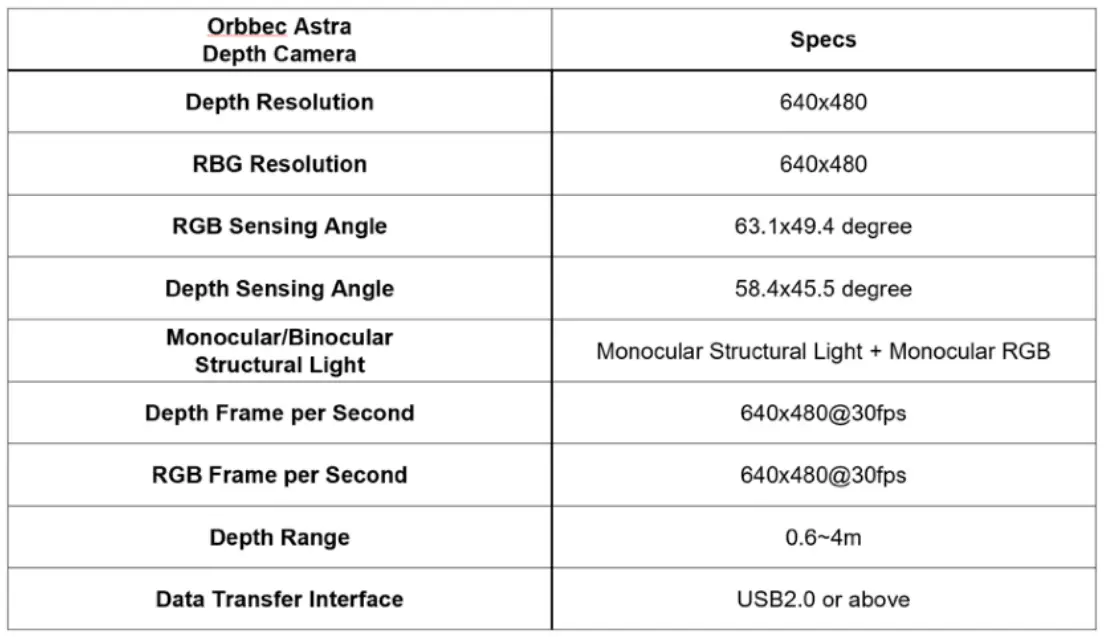
STM32 Board (Motor Nəzarəti, Güc İdarəetmə və IMU)
STM32F103RC lövhəsi bütün Rosbotlarda istifadə edilən mikrokontrollerdir. O, 3 MHz tezliyində işləyən yüksək performanslı ARM Cortex-M32 72 bitlik RISC nüvəsinə və yüksək sürətli quraşdırılmış yaddaşlara malikdir. O, -40°C-dən +105°C-ə qədər temperatur diapazonunda işləyir və dünya iqlimlərində bütün robot tətbiqlərinə uyğun gəlir. Aşağı güc tətbiqlərinin dizaynına imkan verən enerjiyə qənaət rejimləri var. Bu mikrokontrolörün tətbiqlərindən bəzilərinə motor ötürücüləri, tətbiqə nəzarət, robotik tətbiqlər tibbi və əl avadanlıqları, PC və oyun periferiyaları, GPS platformaları, sənaye proqramları, siqnalizasiya sistemi video interkomları və skanerlər daxildir.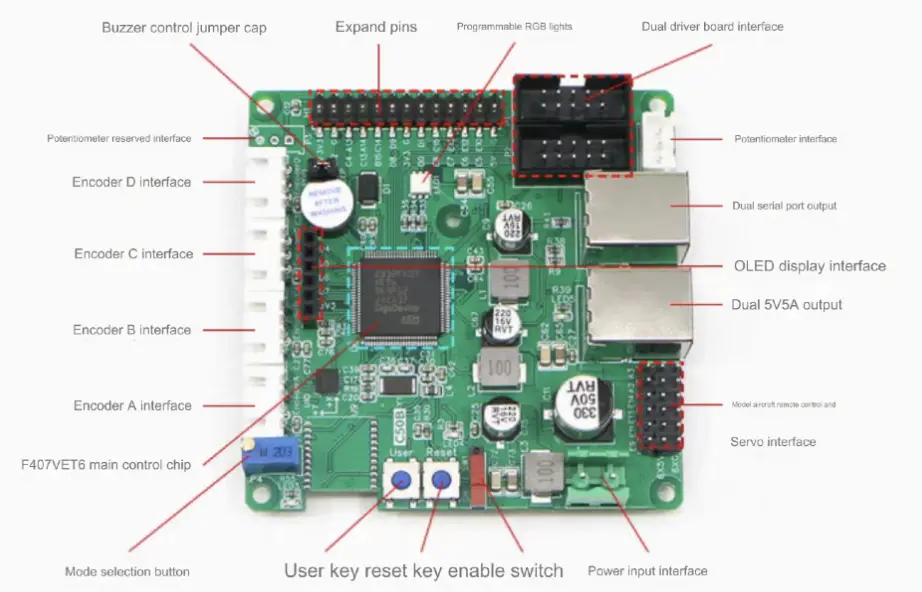
| STM32F103RC | Xüsusiyyətlər |
| Əsas | ARM32-bit Cortex –M3 CPU Maksimum sürət 72 MHz |
| Xatirələr | 512 KB Flash yaddaş 64 kB SRAM |
| Saat, Sıfırlama və Təchizat İdarəetmə | 2.0 - 3.6 V tətbiq təchizatı və I/O |
|
Güc |
Yuxu, Dayanma və Gözləmə rejimləri
RTC və ehtiyat registrlər üçün V təchizatı BAT |
| DMA | 12 kanallı DMA nəzarətçi |
| Sazlama rejimi | SWD və JTAG interfeyslər Cortex-M3 Embedded Trace Macrocell |
| I/O portları | 51 Giriş/Çıxış portu (16 xarici kəsmə vektorunda təsvir edilə bilər və 5V tolerant) |
|
Taymerlər |
4×16 bitlik taymerlər
2 x 16-bit motor idarəetmə PWM taymerləri (fövqəladə dayandırma ilə) 2 x gözətçi taymeri (müstəqil və pəncərə) SysTick taymeri (24 bit aşağı sayğac) DAC-ı idarə etmək üçün 2 x 16-bit əsas taymer |
|
Rabitə interfeysi |
USB 2.0 tam sürətli interfeys SDIO interfeysi
CAN interfeysi (2.0B Aktiv) |
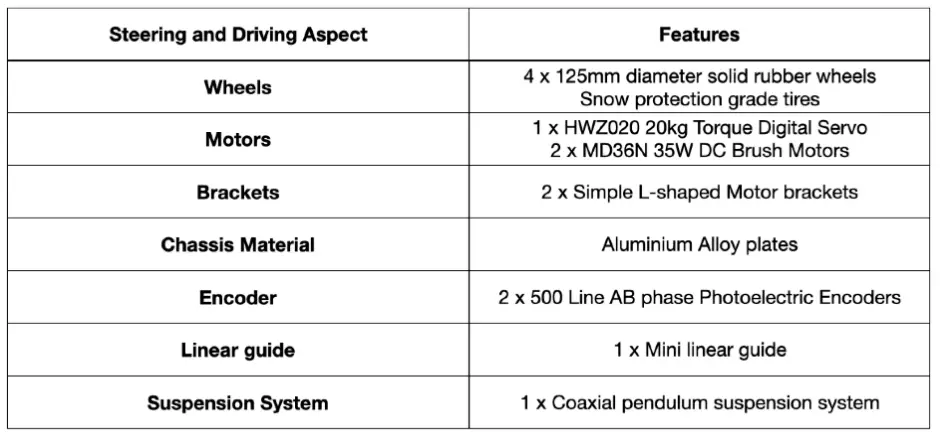
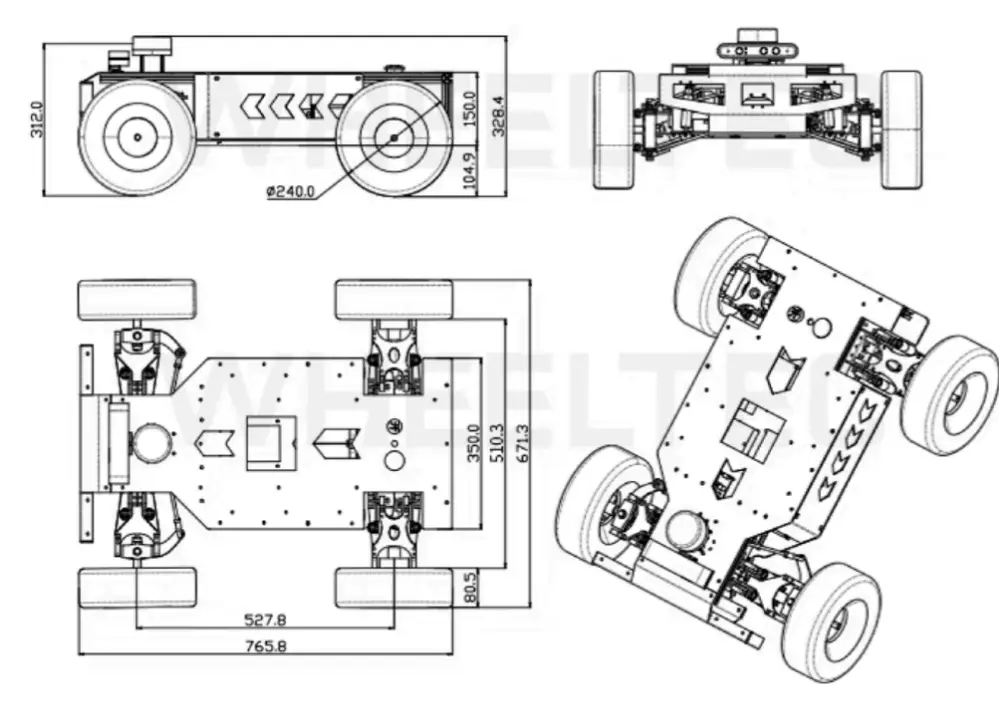
Sükan və Sürmə Sistemi
Sükan və Sürmə sistemi Robotun dizaynı və qurulması ilə inteqrasiya olunub. Alınan modeldən asılı olaraq o, ya 2 təkərli, ya da 4 təkərli olacaq, hər iki variant da müxtəlif tədqiqat və inkişaf məqsədləri üçün uyğundur. Bütün Robotlardakı təkərlər qardan qoruyucu dərəcəli təkərlərlə bərk rezindir. Koaksial sarkaçlı asma sistemi mövcuddur və Robotlar seriyası müstəqil asma sistemləri olan amortizatorlarla təchiz edilib və onların çətin ərazilərdə uğurla hərəkət etməsini təmin edir.
Sükan və Sürmə Texniki Xüsusiyyətləri:
Robot Şassi Dizayn Diaqramı:
Robot 2

Robot Pro
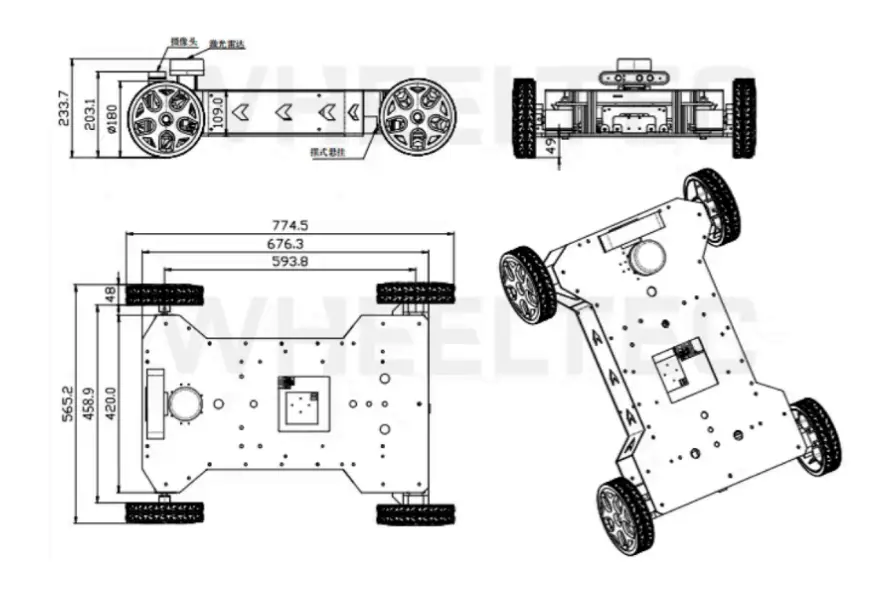
Robot Plus
Güc İdarəetmə
Power Mag – Maqnit LFP Batareyası:
Bütün Rosbotlar 6000 mAh Power Mag, maqnit LFP (Litium Dəmir Fosfat) batareyası və Power Charger ilə gəlir. Müştərilər əlavə ödənişlə batareyanı 20000 mAh-a qədər yüksəldə bilərlər. LFP batareyaları sabitliyi, təhlükəsizliyi və uzun müddət işləmə müddəti ilə tanınan litium-ion batareya növüdür. Kobalt və ya nikeldən istifadə edən ənənəvi litium-ion batareyalardan fərqli olaraq, LFP batareyaları dəmir fosfata əsaslanır və daha davamlı və daha az zəhərli alternativ təklif edir. Termal qaçaqlara yüksək dərəcədə davamlıdırlar, həddindən artıq istiləşmə və yanğın riskini azaldırlar. Digər litium-ion batareyaları ilə müqayisədə daha az enerji sıxlığına malik olsalar da, LFP batareyaları davamlılıq baxımından üstündür, daha uzun ömür müddəti, daha sürətli doldurulması və ekstremal temperaturlarda daha yaxşı performans göstərərək, onları elektrikli nəqliyyat vasitələri (EV) və enerji saxlama sistemləri üçün ideal edir. Power Mag maqnit baza dizaynına görə robotun istənilən metal səthinə yapışdırıla bilər. Batareyaların dəyişdirilməsini tez və asan edir.
Texniki Spesifikasiyalar:
| Model | 6000 mAh | 20000 mAh |
| Batareya Paketi |
22.4V 6000mAh |
22.4V 20000mAh |
|
Əsas material |
Lityum dəmir fosfat |
Lityum dəmir fosfat |
| Cutofi Cilttage | 16.5 V | 16.5 V |
|
Tam Cildtage |
25.55 V |
25.55 V |
| Doldurma cərəyanı | 3A | 3A |
| Qabıq materialı |
Metal |
Metal |
| Boşaltma Performansı | 15A Davamlı Boşaltma | 20A Davamlı Boşaltma |
|
Fiş |
DC4017MM dişi konnektor (doldurma) XT60U-F dişi konnektor (boşaltma) |
DC4017MM dişi konnektor (doldurma) XT60U-F dişi konnektor (boşaltma) |
|
Ölçü |
177*146*42mm |
208*154*97mm |
|
Çəki |
1.72 kq |
4.1 kq |
Batareyanın qorunması
Qısa qapanma, həddindən artıq cərəyan, həddindən artıq yükləmə, həddindən artıq boşalmadan qorunma, istifadə zamanı yükləməyə dəstək, quraşdırılmış təhlükəsizlik klapan, alov gecikdirici lövhə.
Avtomatik Doldurma Stansiyası (Güc+):
Avtomatik Doldurma Stansiyası Rosbot 2+ modeli ilə birlikdə verilir və Rosbot 2, Rosbot Pro və Rosbot Plus ilə işləmək üçün ayrıca alına bilər.
ROS 2 Sürətli Başlanğıc
Robot ilk dəfə işə salındıqda, standart olaraq ROS tərəfindən idarə olunur. Yəni, STM32 şassi nəzarətçi lövhəsi ROS 2 Controller - Jetson Orin-dən əmrləri qəbul edir. İlkin quraşdırma tez və asandır, ana kompüterinizdən (Ubuntu Linux tövsiyə olunur) robotun Wi-Fi hotspotuna qoşulun. Defolt olaraq parol “Dongguan”dır. Sonra, Linuxterminatee l vasitəsilə SSH istifadə edərək robota qoşulun, P ünvanı 192.168.0.10 və 0, standart parol isə Dongguan-dır.
Robota terminal girişi ilə siz “wheeltec_ROS 2” altında ROS 2 iş sahəsi qovluğuna gedə bilərsiniz. Test proqramlarını işə salmazdan əvvəl, wheeltec_ROS 2/turn_on_wheeltec_robot/ ünvanına gedin və wheeltec_udev.sh ünvanını tapın – Bu skript adətən yalnız bir dəfə işlək olmalıdır, periferik konfiqurasiyanın düzgün qurulmasını təmin etmək üçün. İndi siz robotun funksionallığını sınaya, ROS 2 nəzarətçi funksionallığını işə sala bilərsiniz: “relaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch”
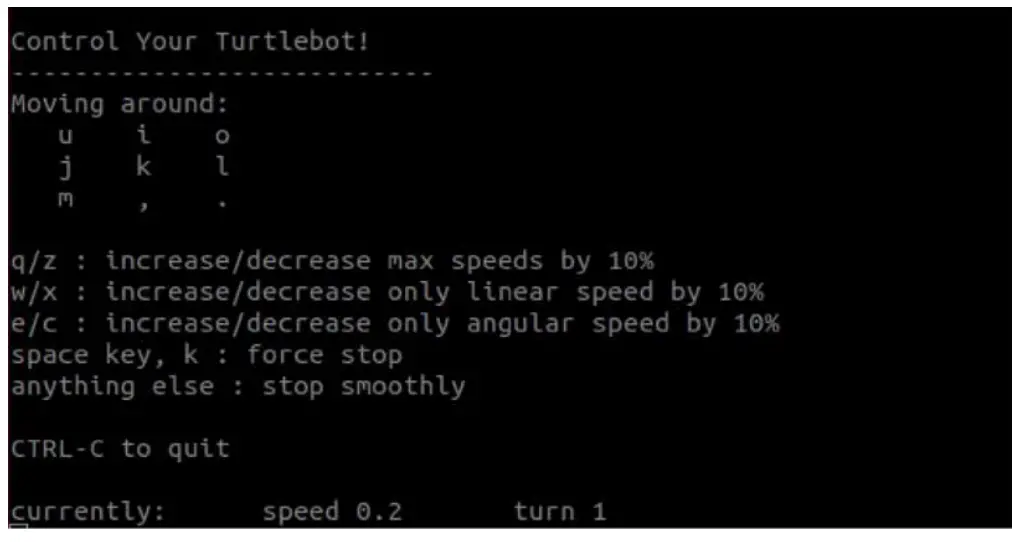
İkinci terminalda siz şassi nəzarətini yoxlamaq üçün keyboard_teleop node istifadə edə bilərsiniz, bu məşhur ROS 2 Turtlebot-un dəyişdirilmiş versiyasıdır.ample. Növ: "relaunch wheeltec_robot_rc keyboard_teleop.launch"
Əvvəlcədən quraşdırılmış ROS 2 Humble Paketləri
Aşağıda istifadəçi yönümlü paketlər verilmişdir, digər paketlər mövcud ola bilsə də, bunlar yalnız asılılıqlardır.
- Wheeltec_robotunu yandırın
Bu paket robotun funksionallığını və şassi nəzarətçisi ilə əlaqəni təmin etmək üçün çox vacibdir. Əsas skript “turn_on_wheeltec_robot.launch” hər açılışda ROS 2 və nəzarətçini konfiqurasiya etmək üçün istifadə edilməlidir. - wheeltec_rviz2
Başlatma ehtiva edir files Pickerbot Pro üçün xüsusi konfiqurasiya ilə viz başlatmaq. - wheeltec_robot_slam
Pickerbot Pro üçün xüsusi konfiqurasiya ilə SLAM Xəritəçəkmə və lokalizasiya paketi. - wheeltec_robot_rrt2
Təsadüfi ağac alqoritminin sürətlə tədqiqi – Bu paket Pickerbot Pro-ya kəşfiyyat qovşaqlarını işə salmaqla istədiyi yerə gedən yolu planlaşdırmağa imkan verir. - wheeltec_robot_klaviaturası
Robotun funksionallığını yoxlamaq və klaviaturadan istifadə etməklə, o cümlədən uzaq host PC-dən istifadə etməklə idarə etmək üçün əlverişli paket. - wheeltec_robot_nav2
ROS 2 Naviqasiya 2 node paketi. - wheeltec_lidar_ros2
Leishen M2/N10 konfiqurasiyası üçün ROS 10 Lidar paketi. - wheeltec_joy
Joystik idarəetmə paketi işə salmağı ehtiva edir files Joystick qovşaqları üçün. - simple_follower_ros2
Lazer skan və ya dərinlik kamerasından istifadə edərək əsas obyekt və xətt izləmə alqoritmləri. - ros2_astra_kamera
Sürücülər və işə salınan Astra dərinlik kamerası paketi files.
Xülasə
Robot ROS (Robot Əməliyyat Sistemi) tərtibatçıları, pedaqoqlar və tələbələr üçün nəzərdə tutulub. Rosbotun ürəyi tam proqramlaşdırıla bilən proqram təminatı çərçivəsi və ən populyar robot platforması - ROS əsasında konfiqurasiya edilə bilən aparat arxitekturasıdır.
Robot üç kateqoriyaya bölünür:
- Robot 2 - ROS yeni başlayanlar və aşağı büdcəli layihələr üçün uyğundur.
- Robot Pro - Sürətli prototipləmə və ya tədris üçün çox yönlü sistemə ehtiyacı olan ROS tərtibatçıları və pedaqoqlar üçün uyğundur.
- Rosbot Plus - Bu, Müstəqil Asma Sistemləri olan Rosbotun 4WD versiyasıdır. Bu kateqoriya sənaye və kommersiya inkişafı üçün nəzərə alınacaq qədər ciddidir. Robot məşhur ROS nəzarətçiləri ilə gəlir, məsələn:
- Jetson Orin Nano
- Jetson Orin NX
Tərəfindən hazırlanmış: Wayne Liu, Reilly Smithers və Tara Hercz 30 sentyabr 2024-cü il
Versiya №: 20240930
Sənədlər / Resurslar
 |
ROBOWORKS N10 Robot Təhsilli Proqramlaşdırıla bilən Mobil Robot [pdf] İstifadəçi Təlimatı N10 Robot Təhsilli Proqramlaşdırıla bilən Mobil Robot, N10, Robot Təhsilli Proqramlaşdırıla bilən Mobil Robot, Təhsil üçün Proqramlaşdırıla bilən Mobil Robot, Proqramlaşdırıla bilən Mobil Robot, Mobil Robot, Robot |