![]()
Pickerbot pro istifadəçi təlimatı
Nəzərə alın ki, göstərilən şəkillər yalnız illüstrativ məqsədlər üçündür*.
Müəlliflər: Wayne Liu, Reilly Smithers
3 iyul 2024-cü il
XÜLASƏ
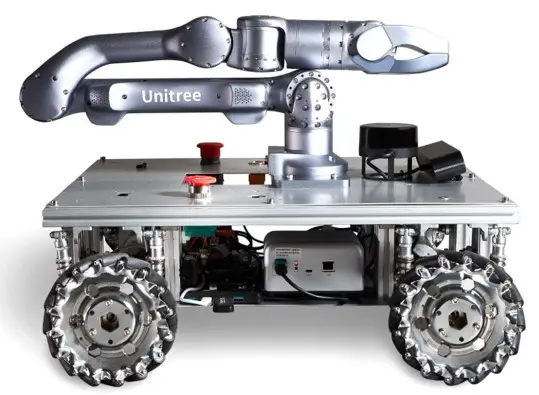
Pickerbot Pro, həm açıq havada, məsələn, kənd təsərrüfatı, mədənçıxarma və tikinti kimi müxtəlif tətbiqlər üçün istifadə oluna bilən çox yönlü R&D robototexnika platformasıdır.
Unitree Z1 Pro Robot qolunu 740 mm-lik məsafəyə və 3 kq yükləmə qabiliyyətinə malik olan Pickerbot Pro, güclə bağlı rəy və toqquşma aşkarlama imkanları ilə yanaşı, 6 dərəcə sərbəstlik ilə təsirli artikulyasiya təklif edir.
NVIDIA Jetson Orin seriyalı tək lövhəli kompüter (Nano və ya NX variantı) ilə təchiz edilmiş o, kompakt və yüngül dizaynı saxlamaqla yanaşı, CUDA-dan istifadə edərək güclü qrafika və ya paralel hesablama funksionallığı ilə daha təkmil kompüter görmə və maşın öyrənmə tapşırıqlarını təmin edir.
Pickerbot Pro dərinliyi hiss etmə, obyekt izləmə və jest tanıma imkanlarını təmin edən Orbbec 3D Astra kamerası ilə təchiz edilmişdir.
Möhkəm, lakin yüngül şassi üzərində qurulmuş Pickerbot Pro, qeyri-bərabər ərazidə təkmil naviqasiya üçün müstəqil asma ilə 4WD sisteminə malikdir. Böyük mecanum təkərləri dəqiq hərtərəfli hərəkət, lakin yüksək tutuş təmin edir.
Əsas komponentlər və aparat
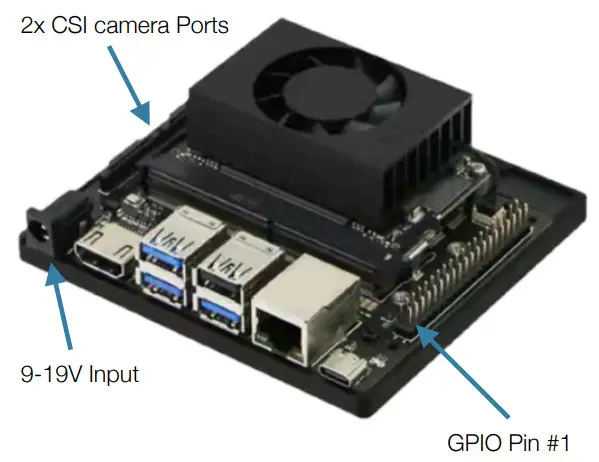
1.1 ROS 2 Nəzarətçi: NVIDIA Jetson Orin (NX 8GB və ya Nano 4GB)
Bortda olan Jetson Orin tək lövhəli kompüter Pickerbot Pro-ya güclü quraşdırılmış hesablama təmin edir. O, 128 GB SSD, Intel Wireless kartı və bort antenaları, HDMI, dörd USB portu (3-ü USB 3.0), Ethernet və USB-C ilə gəlir. Lövhəni gücləndirmək üçün 9-19V arasında bir DC barel yuvası. Bortda olan GPIO sancaqları, Ethernet portuna bitişik xarici sıradakı Pin №1 ilə başlayan məşhur Raspberry Pi tək lövhəli kompüterləri ilə eyni əsas sxemdən istifadə edir. Eyni şəkildə, iki CSI kamera konnektoru Raspberry Pi markası və oxşar kiçik forma faktorlu kameralarla işləməyi təmin edir.
Əvvəlcədən quraşdırılmış proqram təminatına Orin platformasının tam imkanlarını təmin edən ROS 2 Humble, Ubuntu 22.04 və NVIDIA Jetpack daxildir.
Qeyd: Şassi nəzarətçisi və digər robot komponentləri ilə uyğunluğu qorumaq üçün biz Jetson Orin-i müxtəlif proqram təminatı ilə yandırmağı tövsiyə etmirik. Daha təkmil istifadə halları üçün Roboworks dəstəyi ilə əlaqə saxlayın.
1.2 Algılama Sistemi: LiDAR və Dərinlik Kamerası
Pickerbot Pro Leishen M10 LSLiDAR ilə təchiz olunub. 30 m maksimum aşkarlama diapazonu və 12 Hz fırlanma skan etmə tezliyi və yüksək siqnal-küy nisbəti ilə əlavə filtrləmə ehtiyacını aradan qaldırır. O, mükəmməl xəritələşdirmə və naviqasiya imkanlarını təmin edərək, qüsursuz şəkildə inteqrasiya edir.
Bundan əlavə, Pickerbot Pro RGB dərinlik kamerası olan Orbbec Astra Dərinlik Kamerası ilə təchiz edilmişdir. Bu kamera jest nəzarəti, skeletin izlənməsi, 3D skan edilməsi, obyektin aşkarlanması və ROS 2 ilə nöqtə buludunun inkişafı daxil olmaqla bir sıra istifadələr üçün optimallaşdırılıb.
| Dərinlik qətnaməsi | RGB Çözünürlük | RGB hiss bucağı | Dərinlik FPS | RGB çərçivə sürəti | Dərinlik Çərçivə dərəcəsi | Dərinlik Aralığı |
| 640×480 | 640×480 | 63.1 × 49.4 ° | 58 × 45.5 ° | 30 kadr/s | 30 kadr/s | 0.6~4m |
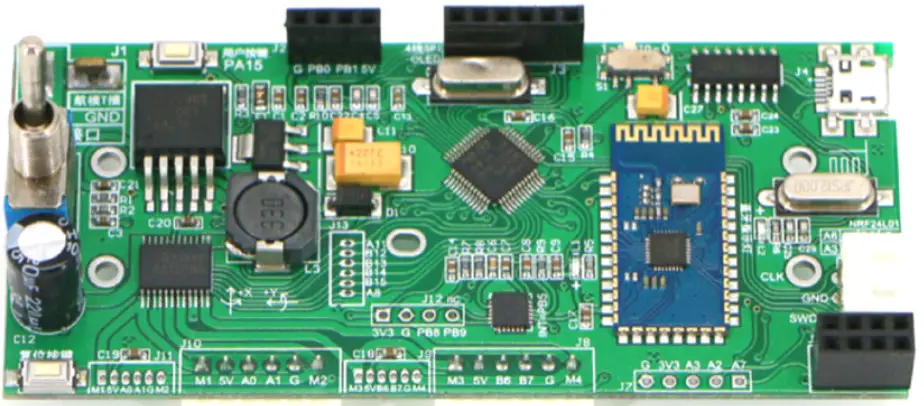
1.3 STM32 İdarəetmə Paneli (Motor Nəzarəti və IMU)
Şassi və motorun idarə edilməsi üçün Pickerbot Pro STM32 idarəetmə lövhəsinə malikdir. Bu lövhə aşağı enerji sərfiyyatı, dəqiq motor nəzarəti, mühərriklərin monitorinqi üçün OLED oxunuş displeyləri və inertial ölçü vahidi (IMU) təmin edir. O, daha ixtisaslaşmış əməliyyat üçün konfiqurasiya edilə bilər və ya Jetson Orin nəzarətçisinə kodlayıcı rəyini aktivləşdirmək üçün. STM32F103-ün yığılması və sonradan yanıb-sönməsi üçün Keil və FlyMCU proqram paketlərindən istifadə.
| STM32F103RC | Xüsusiyyətlər |
| Əsas | ARM32-bit Cortex -M3 CPU Maksimum sürət 72 MHz |
| Xatirələr | 512 KB Flash yaddaş 64 kB SRAM |
| Saat, Sıfırlama və Təchizat İdarəetmə | 2.0 - 3.6 V tətbiq təchizatı və I/O |
| Güc | yatmaq. Dayanma və Gözləmə rejimləri RTC və ehtiyat registrləri BAT üçün V təchizatı |
| DMA | 12 kanallı DMA nəzarətçi |
| Sazlama rejimi | SWD və JTAG interfeyslər Cortex-M3 Embedded Trace Macrocell |
| I/O portları | 51 Giriş/Çıxış portu (16 xarici kəsmə vektorunda təsvir edilə bilər və 5V tolerant) |
| Taymerlər | 4×16 bitlik taymerlər 2 x 16-bit motor idarəetmə PWM taymerləri (fövqəladə dayandırma ilə) 2 x gözətçi taymerləri (müstəqil və pəncərə) SysTick taymeri (24 bit sayğac) DAC-ı idarə etmək üçün 2 x 16-bit əsas taymer |
| Rabitə interfeysi | USB 2.0 tam sürətli interfeys SDIO interfeysi CAN interfeysi (2.0B Aktiv) |
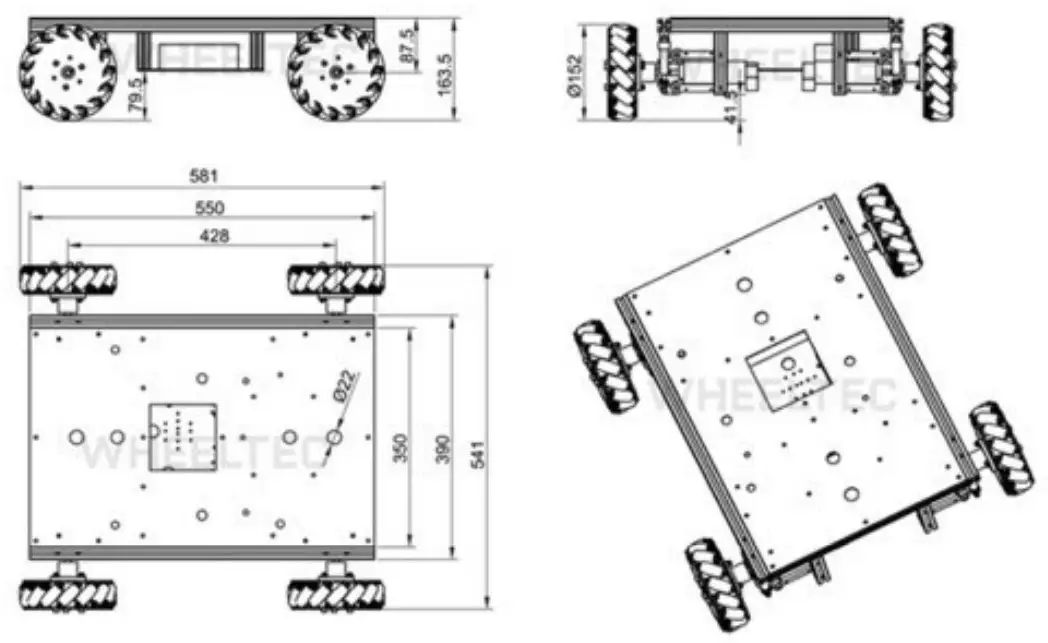
1.4 Şassi bitdiview və Batareya Seçimləri
Pickerbot Pro, hər biri bütün istiqamətlərdə hərəkəti asanlaşdıran 45 dərəcə ofset çarxları olan, hərtərəfli Mecanum təkərləri ilə təchiz edilmişdir. Qeyd etmək vacibdir ki, bu təkərlər cüt-cüt verilir, hər bir cütdə rulonlar fərqli yönümlüdür. Robotda quraşdırma zamanı diaqonal olaraq əks təkərlərin eyni istiqamətə yönəldilmiş rulonlara malik olduğundan əmin olun. Robot gözlənilmədən hərəkət edərsə, sadəcə təkər cütlərini tərsinə çevirin.
Batareyanın tutumunu artırarkən nəzərə alınmalıdır. Pickerbot Pro standart olaraq 5000 mAh batareya ilə gəlir və əlavə ödəniş üçün 10,000 və ya 20,000 mAh seçimlərinə yüksəldilə bilər. 20,000 mAh batareya Pickerbot Pro-nun şassisinə sığmaq üçün çox böyükdür və yalnız robot şassisinin üstünə quraşdırıla bilər. Çəki və ölçü parametrləri üçün aşağıdakı cədvələ baxın.
| Batareya parametri | Xüsusiyyətlər | ||
| 5000 mAh | 10000 mAh | 20000 mAh | |
| Batareya həcmitage | 22.2V | 22.2V | 22.2V |
| Ölçü | 124*71*42mm | 124*71*71mm | 156*122*71mm |
| Elektrik şarj cihazı | DC 5.5 Doldurma fiş T-şəkilli axıdıcı fiş |
DC 5.5 Doldurma fiş T-şəkilli axıdıcı fiş |
DC 5.5 Doldurma fiş T-şəkilli axıdıcı fiş |
| Performans | 15A davamlı d yüklənir |
30A davamlı boşalma | 60A davamlı boşalma |
| Çəki | 0.66 kq | 1.25 kq | 2.4 kq |
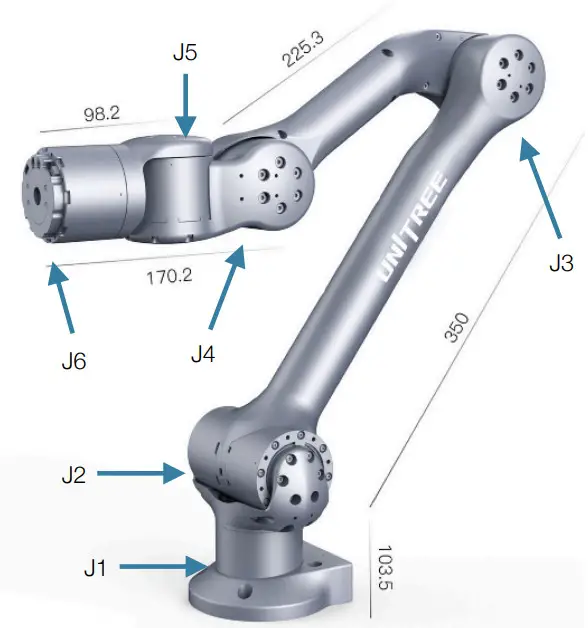
1.5 Unitree Z1 Pro Robot Qol
Pickerbot Pro, 1 dərəcə sərbəstlik və 6 mm çatma ilə təsirli artikulyasiya təmin edən Unitree Z740 Pro robot qolunu özündə birləşdirir. Lütfən, kinematikanı xüsusi tələblərinizə uyğunlaşdırmaq üçün aşağıdakı birgə parametrlər cədvəlinə baxın.
| Birgə | Hərəkət Aralığı | Maksimum Sürət | Max Tork |
| J1 | ±150° | 180°/s | 33N·m |
| J2 | 0-180° | 180°/s | 33N·m |
| J3 | -165°—0 | 180°/s | 33N·m |
| J4 | ±80° | 180°/s | 33N·m |
| J5 | ±85° | 180°/s | 33N·m |
| J6 | ±160 | 180°/s | 33N·m |
| Parametr | Z1 Pro |
| Çəki | 4.5 kq |
| Faydalı yük | 3 kq |
| çatmaq | 740 mm |
| Təkrarlanma qabiliyyəti | ~0.1 mm |
| Enerji təchizatı | 24V |
| İnterfeys | Ethernet |
| Uyğun əməliyyat sistemi | Ubuntu |
| Maksimum güc | 500W |
| Geribildirimi məcbur edin | Bəli |
Proqram təminatı və işə başlama
2.1 ROS 2 Sürətli Başlanğıc
Robot ilk dəfə işə salındıqda, defolt olaraq ROS tərəfindən idarə olunur. Yəni, STM32 şassi nəzarətçi lövhəsi ROS 2 Controller - Jetson Orin-dən əmrləri qəbul edir.
İlkin quraşdırma tez və asandır, ana kompüterinizdən (Ubuntu Linux tövsiyə olunur) robotun Wi-Fi hotspotuna qoşulun. Varsayılan olaraq parol “dongguan”dır.
Sonra, Linux terminalı vasitəsilə SSH istifadə edərək robota qoşulun, IP ünvanı 192.168.0.100, standart parol dongguandır.
![]()
Robota terminal girişi ilə siz “wheeltec_ROS 2” altında ROS 2 iş sahəsi qovluğuna gedə bilərsiniz, test proqramlarını işə salmazdan əvvəl, wheeltec_ROS 2/turn_on_wheeltec_robot/ ünvanına gedin və wheeltec_udev.sh ünvanını tapın – Bu skript adətən yalnız bir dəfə işlədilməlidir. periferik qurğuların düzgün konfiqurasiyasını təmin etmək.
Siz indi robotun funksionallığını sınaya, ROS 2 nəzarətçi funksiyasını işə sala bilərsiniz, işləyin: “roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch”
![]()
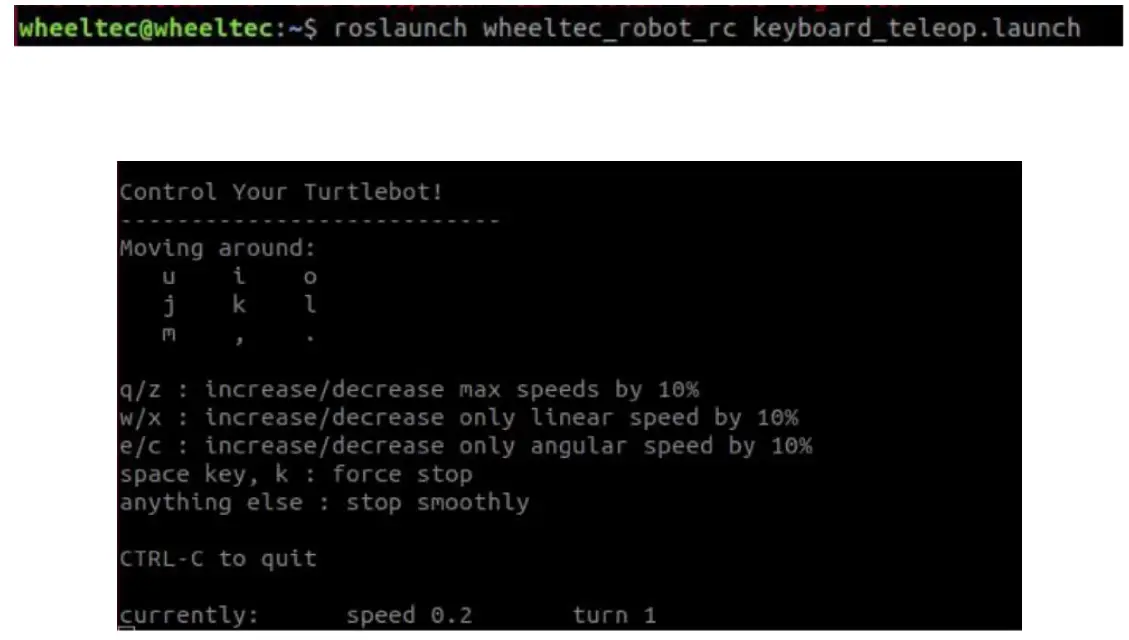
İkinci terminalda siz şassiyə nəzarəti yoxlamaq üçün keyboard_teleop node istifadə edə bilərsiniz, bu məşhur ROS 2 Turtlebot-un dəyişdirilmiş versiyasıdır.ample. Növ: “roslaunch wheeltec_robot_rc keyboard_teleop.launch”
2.2 Şassi üçün əvvəlcədən quraşdırılmış ROS 2 Paketləri
Aşağıda istifadəçi yönümlü paketlər verilmişdir, digər paketlər mövcud ola bilsə də, bunlar yalnız asılılıqlardır.
Wheeltec_robotunu yandırın
Bu paket robotun funksionallığını və şassi nəzarətçisi ilə əlaqəni təmin etmək üçün çox vacibdir.
ROS 2 və nəzarətçini konfiqurasiya etmək üçün hər açılışda “turn_on_wheeltec_robot.launch” əsas skripti istifadə edilməlidir.
wheeltec_rviz2
Pickerbot Pro üçün xüsusi konfiqurasiya ilə rviz-i işə salmaq üçün işəsalma fayllarını ehtiva edir.
wheeltec_robot_slam
Pickerbot Pro üçün xüsusi konfiqurasiya ilə SLAM Xəritəçəkmə və lokalizasiya paketi.
wheeltec_robot_rrt2
Təsadüfi ağac alqoritminin sürətlə tədqiqi – Bu paket Pickerbot Pro-ya kəşfiyyat qovşaqlarını işə salmaqla istədiyi yerə gedən yolu planlaşdırmağa imkan verir.
wheeltec_robot_klaviaturası
Robotun funksionallığını yoxlamaq və klaviaturadan istifadə etməklə, o cümlədən uzaq host PC-dən istifadə etməklə idarə etmək üçün əlverişli paket.
wheeltec_robot_nav2
ROS 2 Naviqasiya 2 node paketi.
wheeltec_lidar_ROS 2
Leishen M2/N10 konfiqurasiyası üçün ROS 10 Lidar paketi.
wheeltec_joy
Joystick idarəetmə paketi, Joystick qovşaqları üçün işəsalma fayllarını ehtiva edir.
sadə_izləyici_ROS 2
Lazer skan və ya dərinlik kamerasından istifadə edərək əsas obyekt və xətt izləmə alqoritmləri.
ROS 2_astra_kamera
Sürücülər və işə salma faylları olan Astra dərinlik kamerası paketi.
Robotik qol inteqrasiyası
3.1 Robotik qolun naqil komponentləri
Unitree Z1 tövsiyə olunan naqillər
Aşağıda Unitree Z1 qolu üçün tövsiyə olunan naqil komponentləri verilmişdir. Elektrik açarından sonra sökülmə yerində mövcud olan qadın 2 qütblü dekan konnektoru olmalıdır. Komponentləri ardıcıl olaraq birləşdirin. Bağlayıcı +/GND əlaqələrinin uyğun olduğundan əmin olun. Bıçaq qoruyucusu müsbət elektrik xəttinə oturmalıdır.
| Komponent | Kəmiyyət |
| Kişi dekan stili 2 dirək bağlayıcı | x1 |
| Kişi xt60 stil 2 qütb bağlayıcı | x1 |
| Daxili bıçaq qoruyucusu | x1 |
| 14 AWG 2 nüvəli kabel | x1 |
| 7.5 Bıçaq qoruyucusu | x1 |
Qol yalnız nisbi kodlayıcılara malik olduğundan, hər işə salındıqda eyni mövqeyə qaytarılmalıdır. Sıfırlamaq üçün qolu asanlıqla açıb-söndürmək üçün kabelə ardıcıl olaraq açar əlavə etməyi məqsədəuyğun hesab edə bilərsiniz.
QEYD: Unitree sənədləri qolun 20A üçün qiymətləndirildiyini söyləyir. Bu yanlışdır. Hər bir enerji təchizatı üçün 10A SMD qoruyucu ardıcıl olaraq əlavə olunur. 7.5A qoruyucudan istifadə 10A SMD qoruyucudan əvvəl yanacaq və dəyişdirilməsi xeyli asan olacaq.
QEYD: Unitree Z1 qolunun sistemdəki əlavə çəkisi səbəbindən ön yaylar qolu dəstəkləyə bilmir. Drop-in 70mm*16mm sıxılma yayları tapıla və ehtiyat yayların yerində istifadə edilə bilər. Alternativ olaraq, şoku əhatə edən böyük yaylar istifadə edilə bilər.
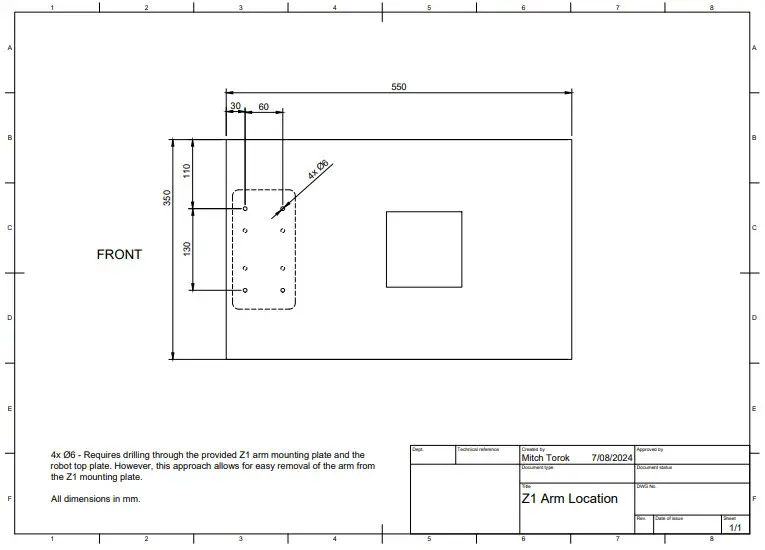
3.2 Robot qolu montaj cizgiləri
3.3 Samprobot qol üçün kod
Bu İstifadəçi Təlimatının hazırlanması zamanı Unitree-nin Z1 Pro üçün SDK-sı yalnız ROS 1 Melodic və ya Noetic-i dəstəkləyir.
Pickerbot Pro məhsul komandası sample kodu ROS 2 Humble-da şassi ilə uyğun gəlir.
SampZ1 Pro robot qolunu şassi ilə birləşdirmək üçün kod aşağıdakı GitHub repozitoriyasından tapıla bilər:
https://github.com/roboworksdev/pickerbotproarm
www.roboworks.net
Copyright © 2024 Roboworks. Bütün hüquqlar qorunur.
Sənədlər / Resurslar
 |
ROBOWORKS Pickerbot Pro Mobil Robotu Seç və Bırak [pdf] İstifadəçi Təlimatı Pickerbot Pro, Pickerbot Pro Seç və Bırak Mobil Robot, Seç və Bırak Mobil Robot, Drop Mobil Robot, Mobil Robot, Robot |