![]()
T60-IO Qapalı Döngü Stepper Sürücüsü
İstifadəçi təlimatı
Shenzhen Rtelligent Mechanical Electrical Technology Co.,ltd
Məhsul bitdiview
Rtelligent T seriyalı rəqəmsal step servo sürücüsünü seçdiyiniz üçün təşəkkür edirik. Stepper servo, yüksək sürət, yüksək fırlanma anı, yüksək dəqiqlik, aşağı vibrasiya, aşağı istilik və pillə itkisi olmayan mövqe rəyi və servo alqoritmi ilə birlikdə ümumi açıq döngə pilləli mühərrik əsasında formalaşmış pilləli mühərrik sxemidir.
TI-nin yeni 32-bit DSP emal çip platformasına əsaslanan T seriyalı pilləli servo sürücü, bütün aspektlərdə adi pilləkəni üstələyən performansa malik olan servo sürücüdə sahə yönümlü idarəetmə (FOC) və vektor sahə zəiflədilməsi idarəetmə alqoritmindən istifadə edir.
- Daxili PID parametrlərinin tənzimlənməsi funksiyası mühərriki müxtəlif növ yüklərin tətbiqinə daha yaxşı cavab verir.
- Daxili sahəni zəiflədən idarəetmə alqoritmi mühərriki maqnit sahəsinin xüsusiyyətlərini azaltmağa və gücü yüksək sürətlə saxlamağa məcbur edir.
- Daxili cərəyan vektoruna nəzarət funksiyası motoru servo və aşağı istilik cərəyanı xarakteristikasına malik edir.
- Daxili mikro pilləli əmr alqoritmi mühərriki müxtəlif sürətlərdə sabit və aşağı vibrasiya saxlayaraq işləyə bilir.
- Daxili 4000 impuls rezolyusiyasına malik kodlayıcı rəyi yerləşdirmə dəqiqliyini artırır və heç vaxt addımı itirmir.
Nəticə olaraq, pilləli mühərrikin xüsusiyyətləri ilə birləşən servo idarəetmə sxemi T seriyalı step servo sürücüsünə eyni gücün servo tətbiqini əvəz edə bilən pilləli motorun performansını daha yaxşı göstərməyə imkan verir. Bu, avtomatlaşdırma avadanlığı üçün optimal qiymət performansının yeni seçimidir.
T60-IO sürücüsü DIP keçid və sazlama proqramı vasitəsilə bölmə və digər parametrləri təyin edə bilər. Cild kimi qoruma funksiyalarına malikdirtage, cari və mövqe və həyəcan çıxış interfeysi əlavə edir. Onun giriş və çıxış idarəetmə siqnalları optik olaraq təcrid olunub.
| Enerji təchizatı | 24 – 50 VDC |
| Nəzarət dəqiqliyi | 4000 Pulse/r |
| Cari nəzarət | Servo vektor idarəetmə alqoritmi |
| Sürət parametrləri | DIP keçid parametri və ya sazlama proqram ayarı |
| Sürət diapazonu | Adi 1200 ~ 1500 rpm, 4000 rpm-ə qədər |
| Rezonansın yatırılması | Avtomatik olaraq rezonans nöqtəsini hesablayın və IF vibrasiyasını maneə törədin |
| PID parametrlərinin tənzimlənməsi | Motor PID xüsusiyyətlərini tənzimləmək üçün proqram təminatını sınayın |
| Pulse filtrasiyası | 2MHz rəqəmsal siqnal filtri |
| Siqnal çıxışı | Həddindən artıq cərəyan, həddindən artıq səs siqnalı çıxışıtage, mövqe xətası və s |
Ümid edirik ki, əla performansa malik məhsullarımız idmana nəzarət proqramını uğurla başa çatdırmağınıza kömək edə bilər. Məhsulları istifadə etməzdən əvvəl bu texniki təlimatı oxuyun.
Tətbiq mühiti və quraşdırma
Ətraf mühit tələbi
| Maddə | Rtelligent T60-IO |
| Quraşdırma mühiti | Toz, yağ və aşındırıcı mühitdən çəkinin |
| Vibrasiya | 0.5G(4.9m/s2)Maks |
| İşləmə temperaturu/rütubəti | 0℃ ~ 45℃ / 90% RH və ya daha az (kondensasiya yoxdur) |
| Saxlama və nəqliyyat temperaturu: | -10℃ ~ 70℃ |
| Soyutma | Təbii soyutma / istilik mənbəyindən uzaq |
| Suya davamlı dərəcəli | IP54 |
Sürücü quraşdırma ölçüləri

Sürücü quraşdırma tələbləri
Lütfən, sürücünü şaquli və ya üfüqi şəkildə, ön tərəfi irəliyə, üstü yuxarıya baxaraq, soyutmanı asanlaşdırın.
Quraşdırma zamanı qazma və digər yad cisimlərin sürücünün içərisinə düşməsindən çəkinin.
Quraşdırma zamanı, lütfən, düzəltmək üçün M3 vintindən istifadə edin.
Quraşdırma mövqeyinə yaxın vibrasiya mənbəyi (məsələn, qazma maşını) olduqda, lütfən, vibrasiya uducudan və ya vibrasiyaya davamlı rezin contadan istifadə edin.
İdarəetmə şkafında bir neçə sürücü quraşdırıldıqda, kifayət qədər istilik yayılması üçün kifayət qədər yer saxlamağa diqqət yetirin. Lazım gələrsə, idarəetmə şkafında yaxşı istilik yayılması şəraitini təmin etmək üçün soyutma fanatlarını konfiqurasiya edə bilərsiniz.
Sürücü portu və əlaqə
Port funksiyasının təsviri
| Funksiya | Dərəcə | Tərif | Qeydlər |
| Enerji təchizatı girişi | V+ | DC enerji təchizatının müsbət qütbünə giriş | DC 24-50y |
| V- | DC enerji təchizatının mənfi qütbünə giriş | ||
| Motor bağlantısı | A+ | Faza-A sarımının müsbət terminalı | Qırmızı |
| Faza-A sarımının mənfi terminalı | Sarı | ||
| B+ | Faza-B sarımının müsbət terminalı | Qara | |
| B- | Faza-B sarımının mənfi terminalı | Yaşıl | |
| Enkoder bağlantısı | EB+ | Kodlayıcı B fazasının müsbət terminalı | Yaşıl |
| EB- | Kodlayıcı B fazasının mənfi terminalı | Sarı | |
| EA+ | Enkoder mərhələsinin müsbət terminalı A | Qəhvəyi | |
| EA- | Kodlayıcı mərhələsinin mənfi terminalı A | Ağ | |
| VCC | Enkoderin işləmə gücü 5V müsbət | Qırmızı | |
| GND | Enkoderin iş gücü 5V torpaq terminalı | Mavi | |
| 10 əlaqə | PUL+ | Stan giriş interfeysi | 24V səviyyəsi |
| PUL- | |||
| DIR+ | İstiqamət daxiletmə interfeysi | ||
| DİR- | |||
| Terminali aktivləşdirin | ENA+ | Nəzarət interfeysini aktivləşdirin | |
| ENA- | |||
| Siqnal çıxışı | ALM+ | Siqnal çıxış interfeysi | 24V, 40mA-dan aşağı |
| ALM- |
Enerji təchizatı girişi
Sürücünün enerji təchizatı DC gücü və giriş həcmidirtage diapazonu 24V ~ 50V arasındadır.
220VAC şəbəkəsini səhvən AC-nin hər iki ucuna qoşmayın! ! !
Güc seçiminə istinad:
Cildtage:
Step motor, mühərrik sürətinin artması ilə fırlanma momentinin azalması və giriş həcminin xüsusiyyətlərinə malikdirtage təsir edəcək ampyüksək sürətli fırlanma anının azalması. Həcmi düzgün artırmaqtaggiriş enerji təchizatının e yüksək sürətlə mühərrikin çıxış torkunu artıra bilər.
Stepper servo adi stepperdən daha yüksək sürət və fırlanma momentinə malikdir. Buna görə də, daha yaxşı yüksək sürətli performans əldə etmək istəyirsinizsə, enerji təchizatı həcmini artırmalısınıztagsürücünün e.
Cari:
Sürücünün iş prosesi girişi yüksək səsə çevirməkdirtage və aşağı cərəyan enerji təchizatı aşağı voltage və mühərrik sarımının hər iki ucunda yüksək cərəyan. Faktiki istifadədə mühərrik modelinə, yük momentinə və digər amillərə uyğun olaraq müvafiq enerji təchizatı seçilməlidir.
Regenerasiyanın təsirləri cildtage:
Step motor işləyərkən generatorun xüsusiyyətlərini də saxlayır. Yavaşlayan zaman yüklə yığılan kinetik enerji elektrik enerjisinə çevriləcək və sürücü dövrəsinə və giriş enerji təchizatına əlavə olunacaq.
Sürücünü və ya enerji təchizatını qorumaq üçün sürətlənmə və yavaşlama vaxtının parametrlərinə diqqət yetirin.
Sürücü söndürüldükdə, mühərriki hərəkət etdirmək üçün yük çəkildikdə sürücünün LED göstəricisinin yandığını görəcəksiniz ki, bu da buna təsir edir.
Enkoder bağlantısı
T60-IO kodlayıcı A/B diferensial çıxışıdır və istifadə edildikdə müvafiq qaydada qoşulur.
| EB+ | EB- | EA+ | EA- | VCC | GND |
| Yaşıl | Sarı | Qəhvəyi | Ağ | Qırmızı | Mavi |
Rtelligent müəyyən uzunluqlu enkoder kabeli ilə təchiz olunub, quraşdırma ehtiyaclarına uyğun olaraq müxtəlif uzunluqlu uzatma kabelləri alın.
Motor bağlantısı
T60-IO sürücüsünün uyğun motoru müvafiq T seriyalı pilləli servo motordur və onun müvafiq motor qoşulma qaydası sabit və unikaldır.

| A+ | Qırmızı |
| A- | Sarı |
| B+ | Qara |
| B- | Yaşıl |
Nəzarət siqnal bağlantısı
PUL, DIR Port: start və stop əmri üçün əlaqə
| Başlanğıc və istiqamət göstəricisi | 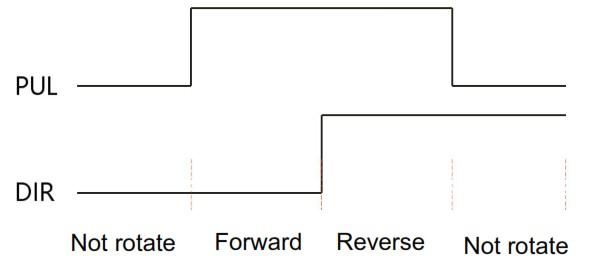 |
| 1. PUL açıq və DIR söndürüldükdə motor irəli fırlanmaq üçün işə salınır. PUL söndürüldükdə motor yavaşlayır və dayanır. 2. PUL və DIR işə salındıqda, motor tərs döndərmək üçün işə salınır. PUL söndürüldükdə motor yavaşlayır və dayanır. 3.PUL söndürüldükdə motor dayanır. |
ENA portu: aktivləşdirin/deaktiv edin
Daxili optocoupler söndürüldükdə, sürücü cərəyanı mühərrikə çıxarır;
Daxili optocoupler işə salındıqda, sürücü mühərriki sərbəst etmək üçün motorun hər bir fazasının cərəyanını kəsəcək və addım nəbzinə cavab verilməyəcək.
Mühərrik səhv vəziyyətində olduqda, avtomatik olaraq sönür. Aktivləşdirmə siqnalının səviyyə məntiqi əksinə təyin edilə bilər.
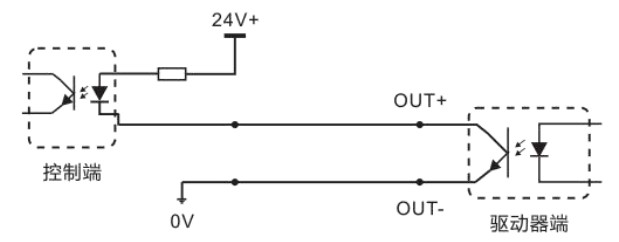
ALM portu: siqnalizasiya və gəliş çıxışı üçün istifadə olunur.
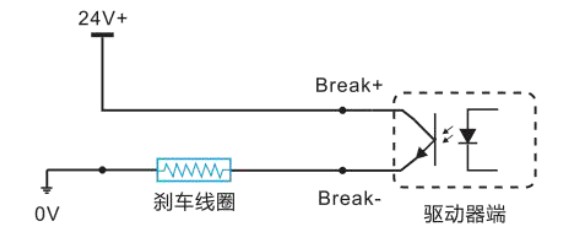
ALM portu sürücünün iş vəziyyətini xarici idarəetmə dövrəsinə çıxarmaq üçün istifadə olunur. Sürücü xəta vəziyyətində və normal iş vəziyyətində olduqda, ALM müxtəlif optokupl səviyyələrini çıxarır. Bundan əlavə, ALM, pilləli servo motorun əyləc açarını əyləclə idarə etmək üçün istifadə olunan proqram tənzimlənməsi vasitəsilə əyləc idarəetmə (break) siqnalı kimi təkrar istifadə edilə bilər. Əyləc bobini induktiv yük olduğundan və mühərrik işləyərkən bobin istiləşməsi ciddi olduğundan, müştərilər əyləc qızdırmasını azaltmaq və ömrünü və etibarlılığını artırmaq üçün ehtiyaclarına uyğun olaraq xüsusi əyləc nəzarətçisi seçə bilərlər.
 Rtelligent xüsusi əyləc nəzarətçiləri üçün həllər təqdim edir, məsələnamples aşağıdakılardır:
Rtelligent xüsusi əyləc nəzarətçiləri üçün həllər təqdim edir, məsələnamples aşağıdakılardır:
RS232 seriya portu

| S/N | Simvol | Təsvir |
| 1 | NC | |
| 2 | +5V | Enerji təchizatının müsbət terminalı |
| 3 | TxD | RS232 ötürücü terminal |
| 4 | GND | Enerji təchizatının yerüstü terminalı |
| 5 | RxD | RS232 qəbuledici terminal |
| 6 | NC |
DIP açarlarının və işləmə parametrlərinin təyini

SW6, SW7 müəyyən edilməyib.
Sürətin təyini
| Sürət | SW1 | SW2 | SW3 | SW4 | Qeydlər |
| 100 | on | on | on | on | Digər sürətlər fərdiləşdirilə bilər |
| 150 | off | on | on | on | |
| 200 | on | off | on | on | |
| 250 | off | off | on | on | |
| 300 | on | on | off | on | |
| 400 | off | on | off | on | |
| 500 | on | off | off | on | |
| 600 | off | off | off | on | |
| 700 | on | on | on | off | |
| 800 | off | on | on | off | |
| 900 | on | off | on | off | |
| 1000 | off | off | on | off | |
| 1100 | on | on | off | off | |
| 1200 | off | on | off | off | |
| 1300 | on | off | off | off | |
| 1400 | off | off | off | off |
Motor istiqamətinin seçimi
DIP SW5 ilkin impuls altında mühərrikin işləmə istiqamətini təyin etmək üçün istifadə olunur. “Söndürülmüş” başlanğıc impuls daxil edilərkən mühərrik istiqamətinin saat yönünün əksinə olması deməkdir; “Açıq” ilkin impuls daxil edilərkən mühərrik istiqamətinin saat əqrəbi istiqamətində olması deməkdir.
• İlkin impuls sürücü proqram təminatının işlənib hazırlanması zamanı istifadə edilən sınaq impulsudur; Zəhmət olmasa motorun faktiki işləmə istiqamətinə baxın.
Açıq/qapalı dövrə seçimi
DIP SW8 sürücünün idarəetmə rejimini təyin etmək üçün istifadə olunur.
“Söndürülmüş” qapalı dövrəli idarəetmə rejimi deməkdir;
“On” açıq dövrəli idarəetmə rejimi deməkdir və motoru yoxlamaq üçün istifadə edilə bilər.
Sürücünün iş vəziyyətinin LED göstəricisi
| LED statusu | Sürücü statusu | |
| Yaşıl göstərici uzun müddətdir yanır | Sürücü aktiv deyil | |
| Yaşıl göstərici yanıb-sönür | Sürücü normal işləyir | |
| Bir yaşıl göstərici və bir qırmızı göstərici | Sürücü həddindən artıq cərəyan | |
| Bir yaşıl göstərici və iki qırmızı göstərici | Sürücünün giriş gücü həddindən artıqtage | |
| Bir yaşıl göstərici və üç qırmızı göstərici | Daxili cildtagsürücünün e səhv edir | |
| Bir yaşıl və dörd qırmızı göstərici | İzləmə xətası limitləri aşır | |
| Bir yaşıl və beş qırmızı göstərici | Kodlayıcı faza xətası | |
Ümumi nasazlıqlar və problemlərin aradan qaldırılması
| Fenomen | Mümkün vəziyyətlər | Həll yolları |
| Motor işləmir | Güc göstəricisi sönüb | Normal enerji təchizatı üçün enerji təchizatı dövrəsini yoxlayın |
| Motorun rotoru kilidlənib, lakin motor işləmir | Nəbz siqnalı zəifdir; siqnal cərəyanını 7-16mA-a qədər artırın | |
| Sürət çox yavaşdır | Düzgün mikro addımı seçin | |
| Sürücü qorunur | Siqnalı həll edin və yenidən işə salın | |
| Siqnal problemini aktivləşdirin | Aktivləşdirmə siqnalını yuxarı çəkin və ya ayırın | |
| Komanda nəbzi səhvdir | Üst kompüterin nəbz çıxışının olub olmadığını yoxlayın | |
| Motorun sükanı səhvdir | Motorun fırlanma istiqaməti tərsdir | DIP SW5-i tənzimləyin |
| Motor kabeli ayrılıb | Bağlantını yoxlayın | |
| Motorun yalnız bir istiqaməti var | Pulse rejimi xətası və ya DIR portu zədələnib | |
| Siqnal göstəricisi aktivdir | Motor bağlantısı səhvdir | Motor əlaqəsini yoxlayın |
| Motor bağlantısı və kodlayıcı bağlantısı səhvdir | Enkoderə qoşulma ardıcıllığını yoxlayın | |
| Cildtage çox yüksək və ya çox aşağıdır | Enerji təchizatını yoxlayın | |
| Mövqe və ya sürət səhvdir | Siqnal pozulur | Etibarlı torpaqlama üçün müdaxiləni aradan qaldırın |
| Komanda girişi səhvdir | Çıxışın düzgün olduğundan əmin olmaq üçün yuxarıdakı kompüter təlimatlarını yoxlayın | |
| Hər bir inqilab üçün Nəbz ayarı səhvdir | DIP keçidinin vəziyyətini yoxlayın və açarları düzgün birləşdirin | |
| Kodlayıcı siqnalı anormaldır | Motoru dəyişdirin və istehsalçı ilə əlaqə saxlayın | |
| Sürücü terminalı | Terminallar arasında qısaqapanma | Güc polaritesini və ya xarici qısa qapanmanı yoxlayın |
| yandı | Terminallar arasında daxili müqavimət çox böyükdür | Tel birləşmələrində həddindən artıq lehim əlavə edilməsi səbəbindən hər hansı bir lehim topunun olub olmadığını yoxlayın |
| Motor dözümsüzdür | Sürətlənmə və yavaşlama vaxtı çox qısadır | Komanda sürətini azaldın və ya sürücü filtrləmə parametrlərini artırın |
| Motor fırlanma anı çox aşağıdır | Yüksək fırlanma anı olan mühərriki seçin | |
| Yük çox ağırdır | Yükün çəkisini və keyfiyyətini yoxlayın və mexaniki quruluşu tənzimləyin | |
| Enerji təchizatı cərəyanı çox aşağıdır | Müvafiq enerji təchizatını dəyişdirin |
Əlavə A. Zəmanət bəndi
A.1 Zəmanət müddəti: 12 ay
Çatdırılma tarixindən bir il müddətinə keyfiyyət təminatı və zəmanət müddəti ərzində məhsullarımıza pulsuz texniki xidmət göstəririk.
A.2 Aşağıdakıları istisna edin:
- Yanlış əlaqə, məsələn, enerji təchizatı polaritesi tərsinə çevrilir və enerji təchizatı qoşulduqda motor bağlantısını daxil edin/çəkin.
- Elektrik və ətraf mühit tələblərindən kənarda.
- Daxili cihazı icazəsiz dəyişdirin.
A.3 Baxım prosesi
Məhsullara qulluq etmək üçün aşağıda göstərilən prosedurlara əməl edin:
- Yenidən işləməyə icazə almaq üçün müştəri xidməti əməkdaşlarımızla əlaqə saxlayın.
- Sürücünün nasazlığı fenomeninin yazılı sənədi mallara əlavə olunur, həmçinin göndəricinin əlaqə məlumatları və poçt üsulları.
Poçt ünvanı:
Poçt kodu:
Tel.:
szruitech.com
Sənədlər / Resurslar
 |
RTELLIGENT T60-IO Qapalı Döngə Stepper Sürücüsü [pdf] İstifadəçi Təlimatı T60-IO, Qapalı Döngü Stepper Sürücüsü, T60-IO Qapalı Döngə Stepper Sürücüsü |



